
СМТ позволяют осуществлять контроль и учет механизированных сельскохозяйственных работ на полях в режиме реального времени, сопоставлять плановые и фактические показатели.
СМТ включают в себя:
- набор датчиков,
- блок определения координат с модемом мобильной связи,
- контроллер-передатчик значений показаний датчиков,
- шину ISOBUS;
- телематический сервер.

В сельском хозяйстве чаще всего на технику устанавливают такие датчики, как:
- датчик расхода топлива,
- датчик распознавания водителя по RFID-картам,
- электронные метки для определения агрегируемых орудий.
Также используются датчики, фиксирующие функциональные операции: подъем кузова, ковша, включение жатки или шнека, глубину заделки семян и т.д. Принцип работы СМТ основывается на получении контроллером информации от подключенных датчиков и последующей передаче по каналам мобильной связи на телематический сервер. Телематический сервер производит обработку поступающих данных и обеспечивает их хранение. Другой важной функцией телематического сервера является обеспечение передачи значений и/или расчетных показателей параметров датчиков во внешнюю систему для последующей обработки данных.
Распространение многообразных систем управления транспортными средствами вызвало необходимость их унификации и стандартизации. Для этого, еще в начале 1990-х, подкомитетом по системам управлениям сообщества инженеров автомобилестроения ( Society of Automotive Engineers – SAE) была начата разработка прикладного профиля на основе полевой шины CAN для внутренней коммуникационной сети грузовых автомобилей. В 1998 году SAE опубликовало набор спецификаций J1939, используемый для объединения контроллеров, установленных в грузовиках и трейлерах, и определяющий обмен данными между двигателем, трансмиссией, тормозной системой, ориентированный на дизельные грузовые автомобили.
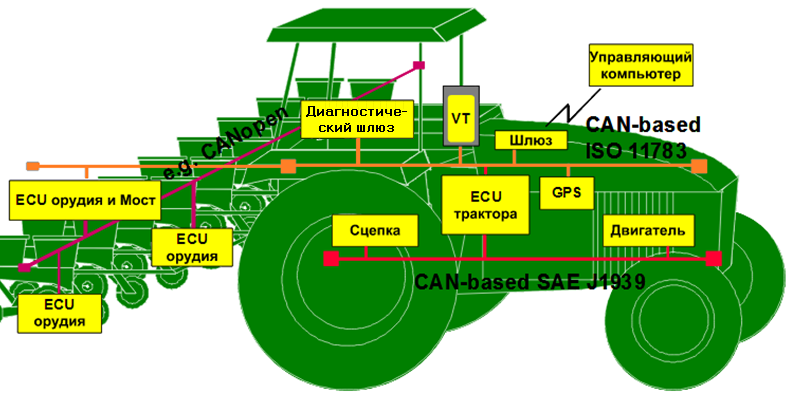
Общие коммуникационные функции J1939 нашли применение в сельскохозяйственной отрасли в прикладном CAN профиле для сельскохозяйственных и лесоводческих машин ISO 11783 и прикладного CAN профиля для грузовиков и трейлеров ISO 11992. Международный стандарт ISO 11783 устанавливает систему коммуникаций сельскохозяйственного оборудования, основанную на протоколе CAN 2.0B (профиль J1939). Для обобщенного обозначения таких стандартов используется наименование ISOBUS.
В 2001 году производители сельскохозяйственных машин пришли к соглашению относительно введения стандарта ISO 11783, который позволил использовать общие интерфейсы связи в тракторах, приспособлениях и системах управления для сельскохозяйственных механизмов. Благодаря этому, продукты различных производителей могут обмениваться между собой данными, при этом требуется меньше специальных устройств управления, предназначенных для конкретных приспособлений, терминалов и дисплеев. Один монитор в кабине трактора позволяет осуществлять управление всеми приспособлениями – пресс-подборщиком, опрыскивателем, разбрасывателем, сеялкой и др. – и устанавливать связь с трактором и системой управления сельскохозяйственными работами. Разработка стандарта ISO11783 не закончена и продолжается в настоящее время.
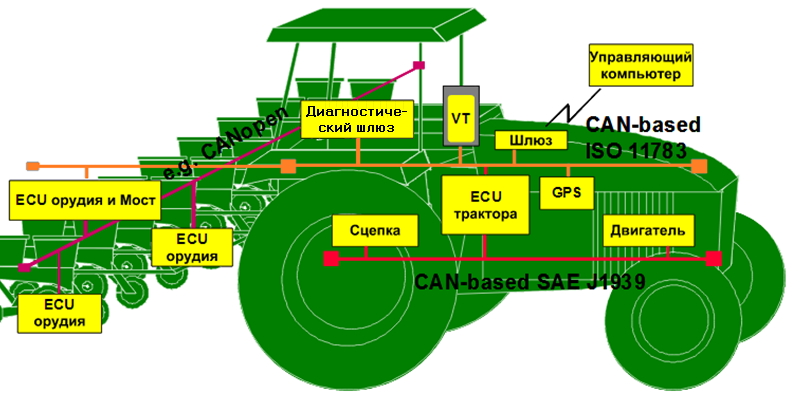
где
ECU – контроллер в терминах SAE J 1939.
VT – виртуальный терминал ISO 11783.
Рассмотрим влияние систем позиционирования и навигации техники на точность расчетов для количественного и качественного учета сельскохозяйственных работ на производственных полях.
Исследовалось влияние точности определения координат сельхозтехники при выполнении работ СМТ на такие значения как пробег, обработанная площадь, скорость, время, местоположение.
Пробег:
СМТ техники обеспечивает погрешность в расчете пробега не более 1,4% для городских условий и не более 0,5% для открытой местности при минимальном количестве видимых спутников (4 шт.).
Обработанная площадь:
Точность расчета обработанных площадей при учете рабочей ширины захвата сельскохозяйственного агрегата зависит от точности построения трека движения техники и от точности изготовления векторных карт-схем производственных полей.
Трек движения техники, видимый на карте, представляет собой трек движения спутниковой антенны. Поэтому, важно правильно выбрать место для установки антенны.
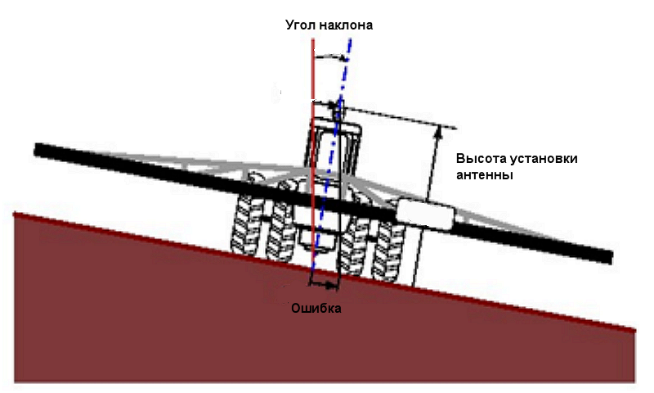
Так как телематические терминалы ГЛОНАСС/GPS не имеют компенсаторов уклонов, то при наклоне на 10º отклонение трека от реального может достигать 1 метра, в зависимости от высоты установки антенны. Проблема в достаточной степени решается установкой спутниковой антенны в передней части капота по оси симметрии вдоль транспортного средства. Также, при такой установке, снижается влияние электромагнитного излучения бортового электронного оборудования, установленного в кабине, на высокочувствительную приемную антенну ГЛОНАСС/GPS.
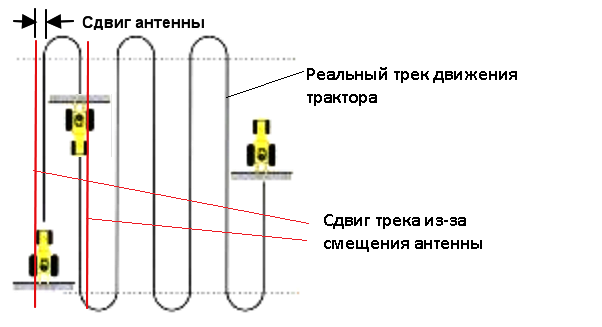
Установка приемной спутниковой антенны, например, на крыше кабины не по оси симметрии (сдвиг антенны) приводит к смещению трека. При ширине кабины 1,5 метра смещение составит 0,75 метра. В этом случае при движении трактора в противоположных направлениях по соседним рядам ошибка отрисовки трека достигнет 1,5 метра. Это приведет к появлению огрехов (пропусков или перекрытий), которых на самом деле нет, что скажется на результате расчета обработанной площади.
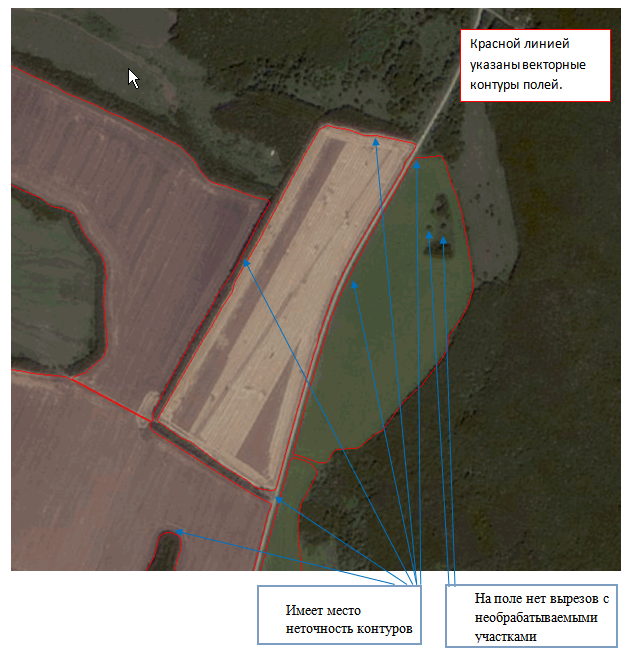
Другим существенным фактором точности определения обработанной площади является качество исполнения и привязки электронных карт к системе координат, используемых в ГИС-системах. Типичными ошибками при векторизации карт, приводящими к неточному расчету обработанных площадей и к сбоям программы при выполнении расчетов, является неверная векторизация контуров полей, отсутствие выделения необрабатываемых участков на полях, ошибки топологии. Указанные ошибки проиллюстрированы на рисунках ниже.

Скорость:
В СМТ скорость движения техники определяется с помощью ГЛОНАСС/GPS-модуля по эффекту Доплера (частота принимаемого сигнала зависит от радиальной скорости приближения или удаления источника сигнала – космических спутников систем ГЛОНАСС/GPS). Точность может быть ниже при маленьком количестве доступных спутников. В СМТ точность определения скорости принудительно снижена до 0,1 км/час, так как этого вполне достаточно для обеспечения контроля соответствия требованиям технологии выполнения сельскохозяйственных работ.
Время:
Точное определение времени – это главное требование к аппаратуре систем спутниковой навигации, поскольку существует задержка распространения радиосигналов от разных спутников. Для навигационных задач модуль определяет время с ошибкой не более 340 наносекунд. При этом часы ГЛОНАСС/GPS приемников синхронизируются с атомными часами космических аппаратов. В СМТ время всех событий округляется до 1 секунды, так как этого достаточно для построения отчетов.
Местоположение:
Средняя погрешность определения положения техники с помощью спутниковых технологий составляет 2-6 метра. В настоящее время точность определения координат системой ГЛОНАСС практически соответствует аналогичным показателям для GPS. Согласно отчетам Российской системы дифференциальной коррекции и мониторинга (СДКМ), сформированным по данным 22 станций системы мониторинга качества функционирования космических навигационных систем ГЛОНАСС и GPS, по состоянию на 18 июля 2016 года ошибки суточных навигационных определений ГЛОНАСС по долготе и широте составляли 4,3-7,86 метров при использовании в среднем 8-9 космических аппаратов (в зависимости от точки приема). В то же время ошибки GPS составляли 3,72-7,29 метров при использовании в среднем 10-12 космических аппаратов (в зависимости от точки приема). При совместном использовании обеих навигационных систем ошибки составляли 3,37-6,17 метров при использовании в среднем 18-21 космических аппаратов (в зависимости от расположения точки приема).
Точность навигации определяется количеством спутников в используемом созвездии и их взаимном расположении. Это, в свою очередь, зависит от ширины диаграммы направленности ГЛОНАСС/GPS-антенны и ее позиционирования (обзора горизонта). Минимальная ошибка достигается на открытых участках местности. Значительная ошибка (до нескольких сотен метров) может кратковременно наблюдаться при работе в помещениях или дворах-колодцах (влияние переотраженных сигналов), под линиями электропередач, возле лесопосадок, и в случаях, когда ГЛОНАСС/GPS-приемник был только что включен и еще не успел определить все видимые спутники. В системе ГЛОНАСС/GPS мониторинга транспорта помимо использования современного навигационного оборудования и правильного монтажа антенны для повышения точности применяется ПО телематического сервера. Такое ПО реализует выполнение специальных алгоритмов фильтрации кратковременных «прыжков» координат, статистическую обработку для более точного определения мест стоянок и данных о качестве созвездия спутников для определения вероятности ошибки и вычисления соответствующего значения коррекции.
При использовании систем спутникового мониторинга ГЛОНАСС и GPS в совместных приемниках точность определения координат на практике всегда более высокая из-за большого количества видимых космических аппаратов и оптимального взаимного расположения. Использование совместного приемника спутникового позиционирования и мониторинга транспорта дает повышение точности в среднем на 40-60%.
Таким образом, использование современных систем спутниковой навигации и мониторинга транспорта позволяет достичь наиболее высокой точности и оперативности при расчетах объема фактической выработки при проведении механизированных сельскохозяйственных работ.